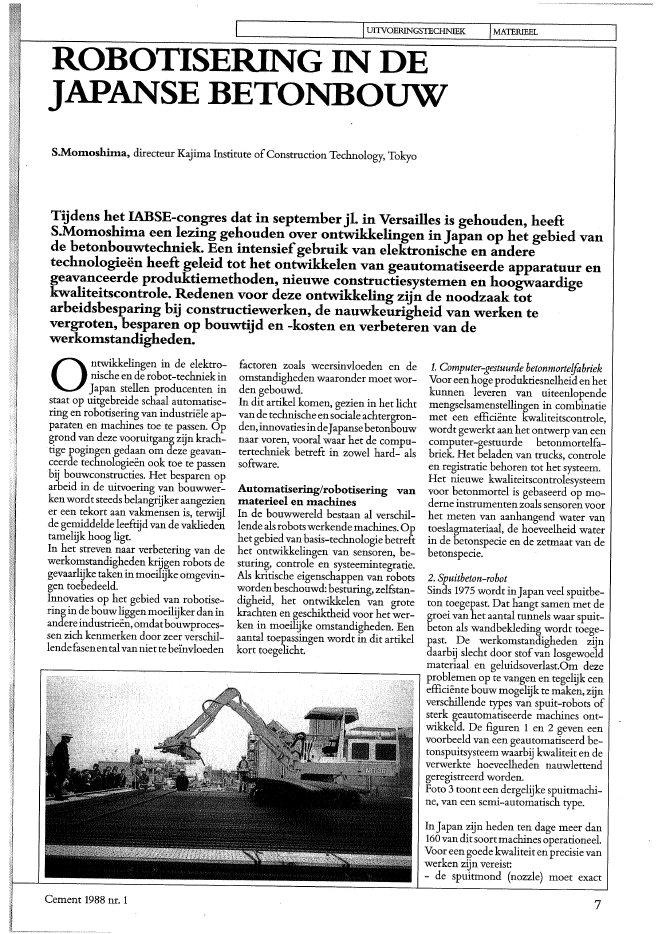
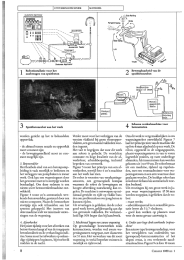
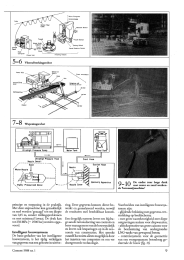
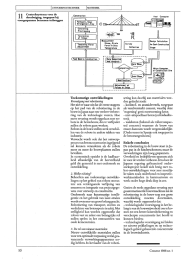
I 1 UITVOERINGSTECHNIEKROBOTISERING IN DEJAPANSE BETONBOUWS.Momoshima, directeur Kajima Institute ofConstruction Technology, TokyoIMATERIEELTijdens het IAB8E-congres dat in septemberjI. in Versailles is gehouden, heeftS.Momoshima een lezing gehouden over ontwikkelingen in Japan op het gebied vande betonbouwtechniek. Een intensiefgebruik van elektronische en anderetechnologie?n heeft geleid tot het ontwikkelen van geautomatiseerde apparatuur engeavanceerde produktiemethoden, nieuwe constructiesystemen en hoogwaardigekwaliteitscontrole. Redenen voor deze ontwikkeling zijn de noodzaak totarbeidsbesparing bij constructiewerken, de nauwkeurigheid van werken tevergroten, besparen op bouwtijd en -kosten en verbeteren van dewerkomstandigheden.Ontwikkelingen in de elektro-nische en de robot-techniek in. Japan stellen producenten instaat op uitgebreide schaal automatise-ring en robotisering van industri?le ap-paraten en machines toe te passen. Opgrond van deze vooruitgang zijn krach-tige pogingen gedaan om deze geavan-ceerde technologie?n ook toe te passenbij bouwconstructies. Het besparen oparbeid in de uitvoering van bouwwer-kenwordt steeds belangrijker aangeziener een tekort aan vakmensen is, terwijlde gemiddeldeleeftijd van de vakliedentamelijk hoog ligt.In het streven naar verbetering van .dewerkomstandigheden krijgen robots degevaarlijke taken in moeilijke omgevin-gen toebedeeld.Innovaties op het gebied van robotise-ring in de bouwliggen moeilijker dan inandereindustrie?n,omdatbouwproces-sen zich kenmerken door zeer verschil-lendefasenentalvanniette be?nvloedenCement 1988 nr. 1factoren zoals weersinvloeden en deomstandigheden waaronder moet wor_den gebouwd.In dit artikel komen, gezien in het lichtvan de technische ensocialeachtergron-den,innovaties indeJapansebetonbouwnaar voren, vooral waar het de compu-tertechniek betreft in zowel hard- alssoftware.Automatisering/robotisering vanmaterieel en machinesIn de bouwwereld bestaan al verschil-lende als robotswerkende machines. Ophet gebied van basis-technologie betrefthet ontwikkelingen van sensoren, be-sturing, controle en systeemintegratie.Als kritische eigenschappen van robotsworden beschouwd: besturing, zelfstan-digheid, het ontwikkelen van grotekrachten en geschiktheid voor het wer-ken in moeilijke omstandigheden. Eenaantal toepassingen wordt in dit artikelkort toegelicht.1. Computer-gestuurde betonmortelfabriekVoor eenhoge produktiesnelheidenhetkunnen leveren van uiteenlopendemengselsamenstellingen in combinatiemet een effici?nte kwaliteitscontrole,wordt gewerkt aan het ontwerp Van eencomputer-gestuurde betonmortelfa-briek. Bet beladen van trucks, controleen registratie behoren tot het systeem.Het nieuwe kwaliteitscontrolesysteemvoor betonmortel is gebaseerd op mo-derne instrumenten zoals sensoren voorhet meten van aanhangend water vantoeslagmateriaal, de hoeveelheid waterin de betonspecie en de zetmaat van debetonspecie.2. Spuitbeton-robotSinds 1975 wordt inJapan veel spuitbe-ton toegepast. Dat hangt samen met degroei van het aantal tunnels waar spuit-beton als wandbekleding wordt toege-past. De werkomstandigheden zijndaarbij. slecht door stofvan losgewoeldmateriaal en geluidsoverlast.Om dezeproblemen op te vangen en tegelijk eeneffici?nte bouw mogelijk te maken, zijnverschillende types van spuit-robots ofsterk geautomatiseerde machines ont-wikkeld. De figuren 1 en 2 geven eenvoorbeeld van een geautomatiseerd be-tonspuitsysteem waarbij kwaliteit en deverwerkte hoeveelheden nauwlettendgeregistreerd worden.Foto 3 toont een dergelijke spuitmachi-ne, van een semi-automatisch type.InJapan zijn heden ten dage meer dan160 van ditsoortmachines operationeel.Voor een goede kwaliteit en precisie vanwerken zijn vereist:- de spuitmond (nozzle) moet exact71IUITVOERINGSTICHNIEKAulornallc Conlroller.,-.-.----,.......- .......-_..----...,---."".,-.,.-.-------..,. .'," "-" """ "" "Robotinstallatie voor hetaanbrengen van spnitbetonIMATERIEELtn?,c..,:,...'2Beweegbaarheid van despnitbetonrobot3 Spnitbetonrobot aan het werk 4Schemaverdeelmachine voorbetonstortenworden gericht op het te behandelenoppervlak;- de afstand tussen nozzle en oppervlakmoet constant zijn;- de bewegingssnelheid moet zo con-stant mogelijk zijn.3, BetonverdelerBet flexibele eind van een betonpomp-leiding is vaak moeilijk te bedienen enhet verleggen van pompbuizen is zwaarwerk. Ook kan een wapeningsnet doorhet geworstel met zo'n stortpijp wordenbeschadigd. Om deze redenen is eennieuw soort betonverdeelmachine ont-wikkeld.Figuur 4 toont zo'n automatisch wer-kende betonverdeler, gestuurd door eenmicro-computer. Naast de bestuurbarestortpijp zijn ook trilnaalden aan hetsysteem gekoppeld. Het inzetten vandeze machineleidt tot minimaleversto-ringen van de wapening.4. AfwerkrobotHetjuiste tijdstip voor het afwerkenvanbetonvloerenhangt afvan de toegepastebetonkwaliteit en de verhardingscondi-ties. Soms moethet afwerken op onhan-dige tijdstippen beginnen, bijvoorbeeldmidden in de nacht.8Verder moet voor het verkrijgen van devereiste vlakheid bij grote vloeropper-vlakten, een groot aantalvakliedenwor-den ingezet.Het valt te begrijpen dat voor dit werkaan robots is gedacht. De voordelen:constante en hoge kwaliteit van de af-werkvloer, arbeidsbesparing, inclusiefbeperken van overwerk.Figuur 5 toont het principe van een af-werkrobot, terwijl foto 6 zo'n machineaan het werk laat zien.De robot is voorzien van verplaatsings-sensoren, een gyroscopisch kompaswaarmee de robot de bewegingen enhoogte-afwerking nauwkeurig kan re-gelen. De machine is ontworpen op mi-nimaal gewicht en rijdt op vlakke ban-denomprobleemloos overjongbeton tekunnen rijden.Uit ervaringen is gebleken dat de robotgoed werk levert, gelijkwaardig aan datvan getrainde vaklieden. De werksnel-heid ligt 50% hoger dan bij handwerk.5. Machinaalle~en van zware wapeningOp grootschalige bouwwerken zoalskernreactoren, worden veel zware wa-peningsstaven toegepast, met diameterstot 51 mmo Het verwerken van dit soortwapening in veelal beperkte ruimten ismoeilijk en tijdrovend.Om dit werk te vergemakkelijken is eenwapeningsrobot ontwikkeld. Figuur 7laathetprincipe zienvande machinedieopfoto 8 staatafgebeeld op eenwerk.Derobot, opgesteld in de uitgangspositie,plaatst wapen?ngsstaven in van te voreningestelde posities, op vaste onderlingeafstanden. Als tussenruimte kanwordengekozenuit 1tot 99 cm. De robotbestaatuit een machine, rijdend op rupsban-den, met een voorraadruimte voor wa~peningsstaveneneenarmwaarmee dezegeplaatst worden. De huidige robot kanzowel met de hand als automatischwor-den bediend.Uit ervaringen bij een groot werk inJa-pan waar wapeningsstaven 0 38 mmwerden toegepast, is gebleken dat de ro-bot~ exact werkt;- arbeidsbesparend is en eenzelfde pres-tatie levert als 5 ? 7 vlechters;- goed kan werken op plaatsen waarvoor de mens gevaar aanwezig is.6. Onder zeer hoge druk werkende 'snijma-chine'Een nieuw type bouwgereedschap, voorhet verwijderen van onderdelen van(gewapend)-betonconstructies of hetslopen ervan, is een verbeterde zand-straalmachine. Figuurgen foto 10 tonenCement 1988 nr. 19 10 De onder zeer hoge druk? - met water en zand werken"de 'betonsnijmachine'~Sand TankWater Tank-~Griwing andshifting DeviceWapeningsrobotUltrahighPressure PumpU/lrahigh Pressure Hose Sand HoseNozzle Oelal I~-_._-.-.- -.-_._- _......... "'"'"'"/ Sand ,(;alerNozzle J "1I 1I I: ~~====iI I /"-, Highly Pressurized Water ) .... --- .... / Nozzle Cover" . 0 / /'--------_._._---_--1'7-85-6 Vloerafwerkingsrobotprincipe en toepassing in de praktijk.Met deze snijmachine kan gemakkelijken snel worden 'gezaagd' tot een dieptevan 0,15 m, zonder trillingsproblemenen met minimaal lawaai. De druk kantot 250 MPa (~ 2500 bar) worden opge-voerd.Intelligent bouwsysteem.De basis-gedachte van het intelligentebouwsysteem, is het tijdig verkrijgenvan gegevens van een gebouw in uitvoe-ring. Deze gegevens kunnen direct be-werkt en geanalyseerd worden, terwijlde resultaten snel beschikbaar komen.Een dergelijk systeem levert een bijdra-ge aan de rationaliseringvan controleenbeter managementvan debouwpraktijken levert ook besparing~nop in de eco-nomie van constructies. Het spreektvanzelfdatzoiets alleenmogelijkis doorhet inzetten van computers en een verdoorgevoerde technologie.Voorbeelden van intelligente bouwsys-temenzijn:- glijdende bekisting met gegevens-ver-strekking op beeldscherm;- met grote nauwkeurigheid zeer diepeontgravingen maken voor diepwanden;- afzinkoperatiesvan grote caissonsvoorde bescherming van ondergrondseLNG-tanks van gewapend beton;- controlesysteem voorde geometrievan een voorgespannen betonbrug ge-durende de bouw (fig. 11).Cement 1988 nr. 1 9IUITVOERINGSTECHNIEK IMATERIEELMicro Computerat Construclion Siter~=.Hosl ComputerC{~"';.,IIII~=====:====1 Adjustment of II Farces in Sta 5 1~ ~ ~ _ ~ ~ ~ ~ ~ JTensioningof StoysConcrelingPrestressingTensioningForceAdjustmentFormwork , SteelArrangement. SloyConstruclionFeed Back to Construclion11 Controlesysteem voor dedoorbuiging, toegepast bijvoorgespannen betonnen tuibruggenToekomstige ontwikkelingenVooruitgang met robotiseringHet ziet er naar uit dat de eerste stappenop het pad van de robotisering in debouwinJapannaar eenverdereverbete-ring van de technologie voeren. Hoemeer ervaring wordt opgedaan met ro-bots in de betonbouw, des te verf~nderzullen de robots gaan werken.Robots inde bouwzullensterkverschil-len van de robots in andere takken vanindustrie.Verwacht wordt ook dat het ontwerp-procesvanbetonconstructies?ngrijpendzal kunnen veranderen als de robotsmeer en meer de bouwplaatsen zullenbevolken.In economisch opzicht is de haalbaar-heid afhankelijk van de hoeveelheidgeld die gemoeid is met onderzoek enontwikkeling.2. Welke richting?Behoeften aan toekomstige ontwikke-lingen op het gebied van robots omvat-ten: een verdergaande verf~ning vansensoren en integratie van projectgege-vens over ontwerp en constructie.Onderzoek naar kunstmatige intell?-gentie en het gebruik van laser-stralenwordteveneensvangrootbelanggeacht.Robotisering van transport, storten enverdichtenvan betonspecie ?s nabij. Metstell?gheid kan worden opgemerkt datrobots vast en zeker een belangrijke rolzullen spelen in het ontmantelen vanoude kerncentrales.3. De rol van nieuwe materialenNieuw ontwikkelde materialen zullenvoor eenoptimale toepassingveelalgea-vanceerde verwerkingsapparatuur no-dig hebben. In het kader van de roboti-sering kan daarbij aan materialen wor-den gedacht zoals:- koolstof- en aramidevezels, toegepastals vezelversterkt cement, waarbij deze'wapening' geen roestvorming kent;- niet-uitspoelbaar beton (collo?daalbe-ton);- walsbeton (bekend als rollercompac-ted concrete) waarmee de bouw vanzware dammen wordt vergemakkelijkt.(Onder meer in Spanjeook toegepast inde betonwegenbouw.)Enkele conclusiesDe robotisering in de bouw staat inJa-pan pas in de kinderschoenen; maar deverwachtingen zijn hoog gespannen.Overheid en bedrijfsleven spannen zichinvoor deverdere uitbouw. Een door deJapanse regering gefinancierd onder-zoeksproject houdt zich bezig met ro-bot-ontwikkelingen voor zeer moeilij-ke taken zoals onderhoud en inspectie-werkzaamheden in kernreactoren enwerk onder hoge druk diep in zee.Gezien de reeds opgedane ervaring metgeautomatiseerde bouwmachines zal derobotisering in de bouw nog een groteontwikkeling moeten doormaken,waarbij wordt opgemerkt dat:- technologische vooruitgang in het be-lang is van de bouwnijverheid om te ko-men tot een betere kostenbeheersing enverscherpte concurrentie het hoofd tekunnen bieden;- technologische vooruitgang zal leidentot nieuwe prikkelingen en op techno-logisch gebied gebaseerde concurrentiein de bouwindustrie.10 Cement 1988 nr. 1
Reacties