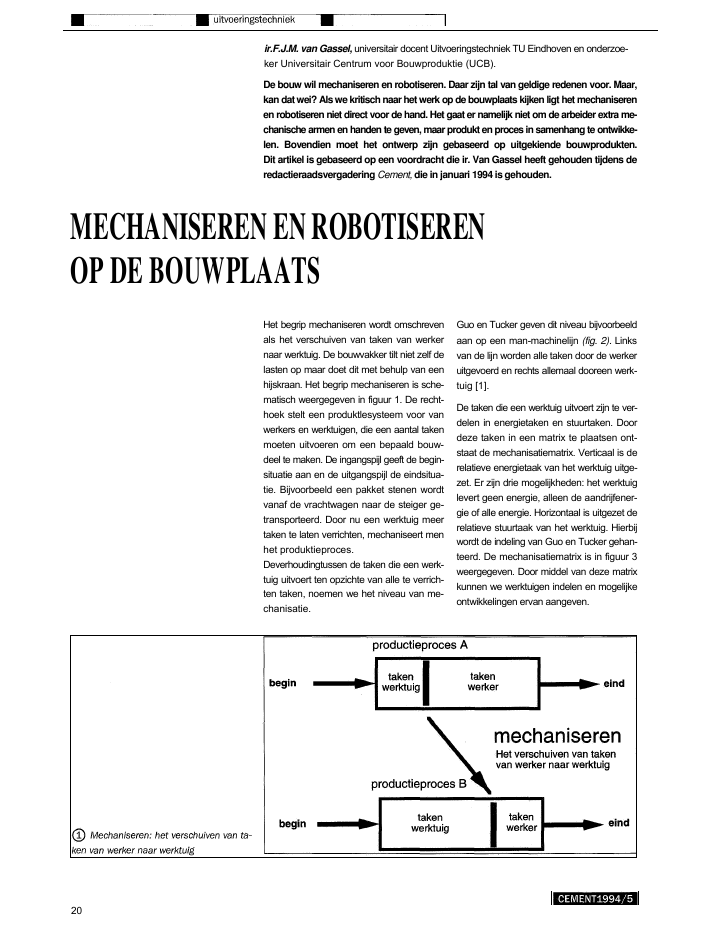
ir.F.J.M. van Gassel, universitair docent Uitvoeringstechniek TU Eindhoven en onderzoe-ker Universitair Centrum voor Bouwproduktie (UCB).De bouw wil mechaniseren en robotiseren. Daar zijn tal van geldige redenen voor. Maar,kan dat wei? Als we kritisch naar het werk op de bouwplaats kijken ligt het mechaniserenen robotiseren niet direct voor de hand. Het gaat er namelijk niet om de arbeider extra me-chanische armen en handen te geven, maar produkt en proces in samenhang te ontwikke-len. Bovendien moet het ontwerp zijn gebaseerd op uitgekiende bouwprodukten.Dit artikel is gebaseerd op een voordracht die ir. Van Gassel heeft gehouden tijdens deredactieraadsvergadering Cement, die in januari 1994 is gehouden.MECHANISERENENROBOTISERENOP DE BOUWPLAATSHet begrip mechaniseren wordt omschrevenals het verschuiven van taken van werkernaar werktuig. De bouwvakker tilt niet zelf delasten op maar doet dit met behulp van eenhijskraan. Het begrip mechaniseren is sche-matisch weergegeven in figuur 1. De recht-hoek stelt een produktlesysteem voor vanwerkers en werktuigen, die een aantal takenmoeten uitvoeren om een bepaald bouw-deel te maken. De ingangspijl geeft de begin-situatie aan en de uitgangspijl de eindsitua-tie. Bijvoorbeeld een pakket stenen wordtvanaf de vrachtwagen naar de steiger ge-transporteerd. Door nu een werktuig meertaken te laten verrichten, mechaniseert menhet produktieproces.Deverhoudingtussen de taken die een werk-tuig uitvoert ten opzichte van alle te verrich-ten taken, noemen we het niveau van me-chanisatie.Guo en Tucker geven dit niveau bijvoorbeeldaan op een man-machinelijn (fig. 2). Linksvan de lijn worden alle taken door de werkeruitgevoerd en rechts allemaal dooreen werk-tuig [1].De taken die een werktuig uitvoert zijn te ver-delen in energietaken en stuurtaken. Doordeze taken in een matrix te plaatsen ont-staat de mechanisatiematrix. Verticaal is derelatieve energietaak van het werktuig uitge-zet. Er zijn drie mogelijkheden: het werktuiglevert geen energie, alleen de aandrijfener-gie of alle energie. Horizontaal is uitgezet derelatieve stuurtaak van het werktuig. Hierbijwordt de indeling van Guo en Tucker gehan-teerd. De mechanisatiematrix is in figuur 3weergegeven. Door middel van deze matrixkunnen we werktuigen indelen en mogelijkeontwikkelingen ervan aangeven.20Wat is nu robotiseren?Op basis van de schema's in de vorige para-graaf is het mogelijk het begrip robotiserente omschrijven. Robotiseren is het verschui-ven van alle taken van werker naar werktuig(fig- 4).De controle- en ondersteuningstaken diedoor de werker worden uitgevoerd, wordenhier buiten beschouwing gelaten omdat de-ze taken niet direct met het produktieproceste maken hebben.In de mechanisatiematrix is het ook mogelijkaan te geven welke werktuigen (robots), zon-der hulp van werkers taken kunnen uitvoe-ren. Dit gebied is in figuur 3 gearceerd aange-geven.Het nut van mechaniseren en robotiserenOm produktietaken te mechaniseren ofte ro-botiseren, is een aantal redenen voor op tenoemen:? verlagen van de uitvoeringstijd;? verlagen van uitvoeringskosten;? verhogen van de produktiviteit;? verbeteren van arbeidsomstandigheden;? uitvoeren van werkzaamheden die nietdoor mensen kunnen worden gedaan;? uitvoeren van werkzaamheden waarbij dearbeidsomstandigheden onaanvaardbaarzijn.Wanneermen produktietaken mechaniseertof robotiseert kan zich een aantal problemenvoordoen:? de ambachtelijke vakman wil niet met eenwerktuig werken en heeft niet het gevoeldat het werktuig een hulp voor hem is;? de beloning van de werker blijft gebaseerdop het bestaande produktieproces;? het werktuig is niet voldoende afgestemdop de omstandigheden op de bouwplaats.Hoe mechaniseren en robotiserenWil men op de bouwplaats met succes me-chaniseren en robotiseren dan is het nietverstandig de taken van de werker bij am-bachtelijke bouwmethoden zoals metselen,stukadoren en timmeren, zonder verdereaanpassingen van produkt en proces dooreen werktuig te laten vervangen.Hier bestaat een aantal redenen voor:? bouwmaterialen en -produkten van veelambachtelijke bouwmethoden zijn nietontwikkeld om te worden gemechani-seerd;? de stuurtaak van de ambachtsman is tecomplex om te mechaniseren ofte roboti-seren;? de ontwerper van het gebouw houdt geenrekening met het mechanisch verwerkenvan bouwmaterialen en -produkten.21(5) Ontwerp-produktie omslagpunten bijproduktie op de bouwplaats en in de fabriek(Everett)Nu volgen twee voorbeelden van het mecha-niseren van ambachtelijke bouwmethodenwaarbij het succes nog even op zich laatwachten.1. Eind 1993 zijn proeven genomen om voe-gen in metselwerk mechanisch te verdich-ten. De hardheid van het voegwerk is aan-merkelijk verbeterd. Maar de voeger maaktminder meters omdat pas mechanischwordt verdicht nadat met de hand is ge-voegd. De voegspijkerzal wel succes hebbenwanneer keihard een hoge hardheid van devoeg wordt voorgeschreven [2].2. Nadat in 1972 de Morres-metselmachinein Gen?ve een gouden medaille kreeg voorde meest praktische uitvinding in zijn soort,komt Laukemper in zijn boek Automation imMauerwerksbau tot de conclusie dat de ont-wikkelingvan een metselrobot niet zonder ri-sico is. Mobiele robots meteen geringe mas-sa, die meteen bepaalde reikwijdte voldoen-de nauwkeurigheid moeten bezitten en diebouwplaats-bestendig zijn, worden op demarkt nog niet aangetroffen. Aan de ontwik-keling van deze robots worden hoge eisengesteld [3].Om toch met succes te kunnen mechanise-ren of te robotiseren, dienen het produkt enhet proces in samenhang te worden ontwik-keld en moeten constructies met uitgekien-de bouwprodukten worden ontworpen.Bouwprodukten en -processen kunnen pasin samenhang worden ontwikkeld wanneermateriaalleveranciers, materieelproducen-ten, bouwproduktproducenten, assembla-gebedrijven en eventueel verhuurbedrijvensamenwerken.Wanneer deze uitgekiende bouwproduktenin prijs, tijd en kwaliteit (leveren wat beloofdis) voldoende voordeel opleveren, zullenontwerpers en opdrachtgevers van gebou-wen deze afnemen.Het mechanisch verwerken van kalkzand-steenelementen is een succes omdat bij deontwikkeling van dit produkt ook nagedachtis hoe het produktieproces op de bouw-plaats moet verlopen. Denk aan de elemen-tensteller, hijsvoorzieningen en het op maatleveren van de elementen.Stand van zakenHet mechaniseren en robotiseren van pro-duktietaken heeft zich op de bouwplaatsveel minder ontwikkeld dan in fabrieken.Everett heeft hiervoor een verklaring opge-steld. Op een hi?rarchischeordeningconsta-teert hij verschillende omslagpunten vanprodukt- en procesontwerp in de fabriek enop de bouwplaats. In deze ordening geeft hijook de mogelijkheden van werktuigen aan(fig. 5). Hij constateert een kloof tussen demogelijkheden van werktuigen en het om-slagpunt van produkt- en procesontwerp opde bouwplaats.[4]Om die kloof te verkleinen zullen de mogelijk-heden van werktuigen verbeterd moetenworden of er moet meer samenhang totstand worden gebracht tussen het Produkt-en procesontwerp.EninJapandan?In Japan, waar de bouw het imago heeft van'zwaar, gevaarlijk en vuil', mechaniseren enrobotiseren de grote bouwondernemingenop de bouwplaats.De schaarste aan arbeid is de reden om zeeractief te zijn bij het ontwikkelen van nieuween effici?nte bouwmethoden.Bij een mankracht die 15 maal zo groot is alsinde Nederlandse bouw, is de omzet ruwweg25 maal zo groot. Er zijn in Japan ongeveer100 'robots' in ontwikkeling [6].Het woord robots is hiertussen aanhalings-tekens gezet omdat in Japan handbediendewerktuigen ook robots worden genoemd.Japanse bedrijven zijn er zeer beducht vooreen apparaat aan het buitenland te verko-pen als zij de leverantie niet kunnen onder-steunen met service ter plaatse.[7]Een Nederlands bedrijf heeft een aantal ja-ren een vloerafwerkingsrobot gekocht. Ditapparaat wordt niet meer gebruikt omdat hette stohngsgevoelig is voor de Nederlandsebouwplaats.Japanse bedrijven investeren veel geld in hetontwikkelen van (spectaculaire) bouwme-thoden. Shimizu heeft het Shimizu Manufac-turingSystem by Advanced Robotics Techno-logy (SMART) ontwikkeld, niet zozeer om dearbeid op de bouwplaats uitte bannen maarveel meer als een bedrijfsstrategie om tekunnen laten zien dat Computer IntegratedConstruction (CIC) de toekomst heeft [5].Een Nederlandse robotIn de afgelopen jaren hebben de bouwonder-nemingen Strukton en HBW samen metboorfabrikant Hilti en TNO-Bouw, een 'loop-boor' ontwikkeld ?n gebouwd (foto 7, blz.24). Deze robot is in staat zelfstandig groteaantallen gaten in betonnen vloeren te bo-ren. Het prototype wordt ingezet bij het borenvan circa 120.000 gaten in de Schipholspoortunnel. Door het inzetten van deze ro-bot wordt gevaarlijk, ongezond en ??ntonigwerk voorkomen.Verbeteren arbeidsomstandighedenVolgens de ARTB in Bouwvisie 2010 vormende arbeidsomstandigheden een knelpunt:? te geringe instroom van goed geschooldearbeidskrachten;? hoge instroom van werknemers in de WAO;? hoog ziekteverzuim;? hoge sociale premies en slecht imago vande bouw [8].Brokelman van de Stichting Arbeidstech-nisch Onderzoek Bouwnijverheid (SAOB)heefteen analyse gemaakt van de ziektever-22zuim- en invaliditeitspercentages bij eenaantal taken die in de bouw worden uitge-voerd.De ziekteverzuim- en invaliditeitspercenta-ges waren hoger dan gemiddeld bij fysiekzwaar werk (de opperman), bij arbeidsinten-sief en monotoon werk (de blokken-steller),bij werk ondertijdsdruk (de tegelzetter) en bijwerk waar weinig of geen mechanische hulp-werktuigen gebruikt worden [9].Men zou kunnen concluderen dat, daar waarhet niveau van mechanisatie laag is, de ziek-teverzuim- en invaliditeitspercentages ho-ger zijn dan gemiddeld.Door Project Kleinschalige MechanisatieBouw (PKMB) Is in 1991 een enqu?te gehou-den onder uitvoerend personeel op de bouw-plaats.60 Procent (n = 379) vond het transportvan materialen de oorzaak voor als zwaar er-varen werkzaamheden [9].Door te mechaniseren kunnen arbeidsom-standigheden worden verbeterd, in tegen-stelling tot robotiseren waarbij geen sprakemeer is van directe produktiearbeid.Robotiseren is wel zinvol wanneer de ar-beidsomstandigheden onaanvaardbaar zijnof wanneer de taken niet door een werkerkunnen worden uitgevoerd.Evolutie op het gebied van vloerafwerking:achtereenvolgens de handtroffel, de troffel-machine, de troffelmachine met bestuurs-plaats en de vloerafwerkingsrobotDe Surf-Robo, een vloerafwerkingsrobot, van Voorbij Betontechniek BV, Wilnis23ToekomstOp korte termijn zullen bij de ambachtelijkeproduktieprocessen de energietaken, enmet name de aandrijfenergie, nog verderkunnen worden gemechaniseerd. Bijvoor-beeld het opperen van bouwprodukten enhet transporteren van mortels.Op middellange termijn voorspelt de ARTB inBouwvisie 2010 dat de bouwplaats in toene-mende mate een assemblageplaats wordtvan geprefabriceerde bouwprodukten.De werktuigen die men dan op de bouw-plaats zal inzetten dienen in samenhangmet bouwprodukten te worden ontwikkeld.De energietaken die een werker dan nog zaluitvoeren zullen minimaal en ergonomischverantwoord zijn. De stuurtaken zullen blij-ven.Om dit te bereiken zullen leveranciers en as-semblagebedrijven van bouwprodukten enmachinefabrieken moeten gaan samenwer-ken.Op lange termijn zal het misschien mogelijkzijn ook de stuurtaken door een werktuig telaten uitvoeren; pas dan zal de robot breedworden ingezet.Dit wil niet zeggen dat we voorlopig geen ro-bot op de bouwplaats zullen aantreffen.Maar ze zullen alleen in die situaties voorko-men waar de taken niet door een werker kun-nen worden uitgevoerd. Figuur 6 geeft deontwikkelingen weer.() De loopboor, waarvan het prototype isingezet in de Schiphol spoortunnel (zie ookblz. 62)Literatuur1. Guo, S en Tucker, R, 'Automation needs de-termination using approach', Procee-dings of the 10th International Symposiumon Automation and Robotics in construction(ISARC), Elsevier Amsterdam 1993.2. Bouwwereld, nr.l (januari 1994), Mecha-nisch voegen verhoogt kwaliteit.3. Laukemper, J., 'Automation im Mauer-werksbau', Expert Verlag, Stuttgart 1992.4. Everett. J.G., 'Design-Fabrication Interfa-ce Construction vs Manufacturing', Procee-dings of the 10th International Symposiumon Automation and Robotics in construction(ISARC), Elsevier Amsterdam, 1993.5. Miatake, Y, 'SMART-system: Afull scale im-plementation of computer integrated con-struction', voordracht op ISARC X in Houston,USA 1993.6. Stumpel, J, 'Bouwbeleid en bouwtechnolo-gie in Japan', Voordracht voor de adviesraadARTB, 1993.7. Stumpel, J, Brief aan auteur, 1994.8. ARTB Bouwvisie 2010, juli 1993, DenHaag.9. Brokelman, L, Voordracht tijdens college'Mechanisatie op de bouwplaats', TU Eind-hoven, 12 december 1993.24




Reacties